
Используйте настройки Physics (главное меню: Edit > Настройки проекта, затем выберите категорию Physics) чтобы применить глобальные настройки для 3D-физики.
Примечание. Для управления глобальными настройками 2D-физики используйте вместо этого настройки 2D-физики.
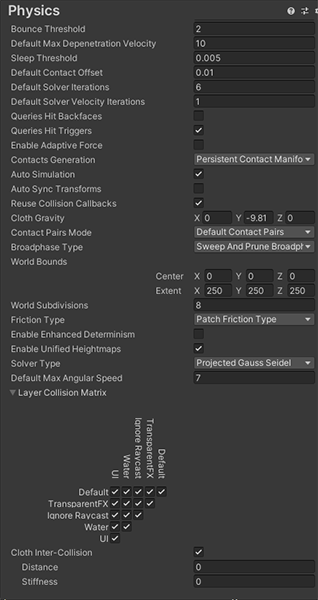
Эти настройки определяют пределы точности физической симуляции. Вообще говоря, более точное моделирование требует больших затрат на обработку, поэтому эти настройки предлагают способ найти компромисс между точностью и производительностью. Дополнительную информацию см. в разделе Физика руководства.
| Свойства | Функция | |
|---|---|---|
| Gravity | Используйте оси x, y и z, чтобы установить силу тяжести, применяемую ко всем компонентам Rigidbody. Для реалистичных настроек гравитации примените отрицательное число к оси Y. Гравитация определяется в мировых единицах на секунду в квадрате. Примечание. При увеличении гравитации может потребоваться также увеличить значение Итерации решателя по умолчанию для поддержания стабильных контактов. |
|
| Default Material | Установите ссылку на материал физики по умолчанию, который будет использоваться, если ни один из них не был назначен отдельному коллайдеруневидимой форме, которая используется для обработки физические столкновения для объекта. Коллайдер не обязательно должен быть точно такой же формы, как сетка объекта — грубое приближение часто бывает более эффективным и неразличимым в игровом процессе. Подробнее См. в Словарь. |
|
| Bounce Threshold | Установите значение скорости. Если два сталкивающихся объекта имеют относительную скорость ниже этого значения, они не отскакивают друг от друга. Это значение также снижает джиттер, поэтому не рекомендуется устанавливать очень низкое значение.. | |
| Default Max Depenetration Velocity | Определите значение по умолчанию для максимальной скорости удаления (скорость, которую решатель может установить для тела, пытаясь вывести его из перекрытия с другими телами). | |
| Sleep Threshold | Установите глобальный энергетический порог, ниже которого некинематический Rigidbodyкомпонент, позволяющий воздействовать на GameObject смоделированной гравитацией и другими силы. Подробнее См. в Словарь (то есть тот, который не контролируется системой физики ) может пойти спать. Когда Rigidbody спит, он не обновляется каждый кадр, что делает его менее ресурсоемким. Если кинетическая энергия твердого тела, деленная на его массу, ниже этого порога, оно считается кандидатом на сон. |
|
| Default Contact Offset | Задайте расстояние обнаружение столкновенияАвтоматический процесс, выполняемый Unity, который определяет, попал ли в столкновение движущийся игровой объект с компонентом Rigidbody и коллайдером. контакт с любыми другими коллайдерами. Подробнее См. Словарь, который система использует для создания контактов столкновения. Значение должно быть положительным, и если оно слишком близко к нулю, это может вызвать дрожание. По умолчанию установлено значение 0,01. Коллайдеры генерируют контакты столкновения только в том случае, если расстояние до них меньше суммы значений смещения их контактов. |
|
| Default Solver Iterations | Определите, сколько процессов решателя Unity запускает в каждом физическом кадре. Решатели — это небольшие задачи физического движка, которые определяют ряд физических взаимодействий, таких как движения суставов или управление контактом между перекрывающимися компонентами Rigidbody. Это влияет на качество выходных данных решателя, и рекомендуется изменить свойство в случае, если используется нестандартное Time.fixedDeltaTime или если конфигурация слишком требовательна. Как правило, он используется для уменьшения джиттера, возникающего из-за стыков или контактов. |
|
| Default Solver Velocity Iterations | Установите, сколько процессов скорости выполняет решатель в каждом физическом кадре. Чем больше процессов выполняет решатель, тем выше точность результирующей скорости выхода после отскока Rigidbody. Если у вас возникают проблемы с соединенными компонентами Rigidbody или Ragdolls, которые слишком сильно двигаются после столкновений, попробуйте увеличить это значение. | |
| Queries Hit Backfaces | Включите этот параметр, если вы хотите, чтобы физические запросы (такие как Physics.Raycast) обнаруживали совпадения с треугольниками обратной стороны MeshColliders. По умолчанию этот параметр отключен. |
|
| Queries Hit Triggers | Включите эту опцию, если вы хотите, чтобы физические тесты попадания (такие как Raycasts, SphereCasts и SphereTests) возвращали попадание, когда они пересекаются с коллайдером, помеченным как триггер. Отдельные рейкасты могут переопределить это поведение. По умолчанию этот параметр включен. | |
| Enable Adaptive Force | Включите эту опцию, чтобы включить адаптивную силу. Адаптивная сила влияет на то, как силы передаются через кучу или стопку объектов, чтобы придать более реалистичное поведение. По умолчанию этот параметр отключен. | |
| Contacts Generation | Выберите метод генерации контактов. | |
| Legacy Contacts Generation | До Unity 5.5 в Unity использовался метод генерации контактов, основанный на теореме о разделяющей оси (SAT.
PCM более эффективен, но для старых проектов вам может быть проще продолжать использовать SAT, чтобы избежать незначительной переделки физики. PCM может привести к немного другому отказу, и меньше бесполезных контактов попадет в буферы контактов (то есть массивы, которые вы получаете в СтолкновениеСтолкновение происходит, когда физический движок обнаруживает, что коллайдеры двух игровых объектов соприкасаются или перекрываются, когда хотя бы один из них имеет компонент Rigidbody и находится в движении. Подробнее Совет по обновлению. Чтобы перенести проект, созданный с помощью Unity 2018.2 или более ранней версии, вам может потребоваться обновить сценарии, чтобы они работали с кодом, который объединяет исправления в коллекторе и выбирает контакты. |
|
| Коллектор постоянных контактов (PCM) | Создает меньше контактов в каждом физическом кадре, и больше контактных данных передается между кадрами. Путь генерации контактов PCM также является более точным и обычно обеспечивает лучшую обратную связь в большинстве случаев. Для получения дополнительной информации см. документацию Nvidia. на коллекторе постоянных контактов. Это значение по умолчанию. |
|
| Auto Simulation | Включите эту опцию, чтобы запустить симуляцию физики автоматически или разрешить явное управление ею. | |
| Auto Sync Transforms | Включите этот параметр, чтобы автоматически синхронизировать изменения преобразования с физической системой всякий раз, когда компонент преобразованиякомпонент преобразования определяет положение, вращение и масштаб. каждого объекта сцены. Каждый GameObject имеет Transform. Подробнее См. в Словарь изменения. По умолчанию этот параметр отключен. |
|
| Contact Pairs Mode | Выберите тип генерации контактной пары для использования. | |
| Default Contact Pairs | Получать события столкновения и срабатывания от всех пар контактов, кроме кинематико-кинематических и кинематико-статических пар.. | |
| Enable Kinematic Kinematic Pairs | Получайте события столкновения и триггера от пар кинематико-кинематических контактов. | |
| Enable Kinematic Static Pairs | Получайте события столкновения и триггера от пар кинематико-статических контактов. | |
| Enable All Contact Pairs | Получать события коллизии и триггера от всех пар контактов. | |
| Broadphase Type | Выберите, какие широкофазные алгоритм для использования в физическом моделировании. См. документацию NVIDIA по PhysX SDK и Столкновение жесткого тела. | |
| Sweep and Prune Broadphase | Используйте метод широкого фазового столкновения «прогон и обрезка» (то есть сортировка объектов вдоль одной оси, чтобы исключить необходимость проверки пар, которые находятся далеко друг от друга).. | |
| Multibox Pruning Broadphase | При сокращении нескольких ячеек используется сетка, и каждая ячейка сетки выполняет удаление и удаление. Обычно это помогает повысить производительность, если, например, имеется много GameObjectsфундаментальный объект в сценах Unity, который может представлять персонажей, реквизит , пейзажи, камеры, путевые точки и многое другое. Функциональность GameObject определяется прикрепленными к нему компонентами. Подробнее См. в Словарь в плоском мире. |
|
| Automatic Box Pruning | Этот алгоритм аналогичен алгоритму Multibox Pruning, за исключением того, что он также может автоматически вычислять границы мира и количество подразделений. Он поддерживает набор ячеек сетки и использует обычный подход «прогонки и обрезки» для проработки потенциально перекрывающихся пар коллайдеров. Обычно это помогает с большими сценамиСцена содержит окружение и меню вашей игры. Думайте о каждом уникальном файле сцены как об уникальном уровне. В каждой сцене вы размещаете свое окружение, препятствия и декорации, по сути проектируя и создавая свою игру по частям. Подробнее Посмотрите в Словарь, где однократное удаление и удаление приведет к большому количеству дополнительных ложных срабатываний.. |
|
| World Bounds | Определите двухмерную сетку, охватывающую мир, чтобы удаленные объекты не влияли друг на друга при использовании алгоритма Multibox Pruning Broadphase. Этот параметр используется только в том случае, если для параметра Тип широкополосной фазы задано значение Мультибокс, сокращение широкополосной фазы.. |
|
| World Subdivisions | Количество ячеек по осям x и z в алгоритме двумерной сетки. Этот параметр используется только в том случае, если для параметра Тип широкополосной фазы задано значение Обрезка многоядерной фазы. |
|
| Friction Type | Выберите алгоритм трения, используемый для моделирования. | |
| Patch Friction Type | Базовый алгоритм сильного трения, который обычно приводит к наиболее стабильным результатам при небольшом количестве итераций решателя. Этот метод использует только до четырех ограничений скалярного решателя на пару соприкасающихся объектов. | |
| One Directional Friction Type | Упрощение модели кулоновского трения, в которой трение для данной точки контакта применяется в чередующихся тангенциальных направлениях нормали контакта. Это требует больше итераций решателя, чем трение заплат, но не так точно, как двунаправленная модель. Чтобы тела сочленения работали с этим типом трения, установите для параметра Тип решателя значение Temporal Gauss Seidel. | |
| Two Directional Friction Type | Подобна однонаправленной модели, но применяет трение одновременно в обоих касательных направлениях. Это требует большего количества итераций решателя, но является более точным. Более дорогой, чем исправление трения для сценариев с большим количеством точек контакта, потому что он применяется в каждой точке контакта. Чтобы тела сочленения работали с этим типом трения, установите для параметра Тип решателя значение Temporal Gauss Seidel. | |
| Enable Enhanced Determinism | Simulation in the scene is consistent regardless the actors present, provided that the game inserts the actors in a deterministic order. This mode sacrifices some performance to ensure this additional determinism. | |
| Enable Unified Heightmaps | Включите этот параметр, чтобы обрабатывать Terrainландшафт в вашей сцене. Игровой объект Terrain добавляет в вашу сцену большую плоскую плоскость, и вы можете использовать окно Terrain Inspector для создания подробного ландшафта. Подробнее Просматривайте в Словарь коллизии так же, как MeshОсновной графический примитив Unity. Меши составляют большую часть ваших 3D-миров. Unity поддерживает триангулированные или четырехугольные полигональные сетки. Поверхности Nurbs, Nurms, Subdiv должны быть преобразованы в полигоны. More info See in Словарь столкновения. |
|
| Solver Type | Выберите тип решателя PhysX для использования в симуляции. | |
| Projected Gauss Seidel | Решатель PhysX по умолчанию. | |
| Temporal Gauss Seidel | Этот решатель обеспечивает лучшую сходимость и лучшую обработку отношений больших масс, сводит к минимуму энергию, вносимую при исправлении проникновения, и повышает сопротивление стыков Физический компонент, обеспечивающий динамическую связь между компонентами Rigidbody, обычно допускающий некоторую степень движения, например шарнир. Подробнее См. в Словарь о перенапряжении. Обычно это помогает, когда вы испытываете неустойчивое поведение во время моделирования с решателем по умолчанию.. |
|
| Layer Collision Matrix | Определите, как ведет себя система обнаружения столкновений на основе слоев. Выберите, какие слои в матрице столкновений взаимодействуют с другими слоями, проверив их.. | |
| Cloth Inter-Collision | Укажите один набор частиц для тканикомпонента, который работает с Skinned Mesh. Renderer для предоставления основанного на физике решения для моделирования тканей. Подробнее Посмотрите в Словарь взаимное столкновение, чтобы ткани в вашей игре двигались более реалистично. |
|
| Distance | Определите диаметр сферы вокруг каждой взаимно сталкивающейся частицы ткани. Unity гарантирует, что эти сферы не перекрываются во время моделирования. Расстояние должно быть меньше наименьшего расстояния между двумя частицами в конфигурации. Если расстояние больше, столкновение с тканью может нарушить некоторые ограничения расстояния и привести к дрожанию. | |
| Stiffness | Насколько сильным должен быть разделяющий импульс между взаимно сталкивающимися частицами ткани. Решатель ткани вычисляет это, и этого должно быть достаточно, чтобы разделить частицы. | |
